外壳的方向检查
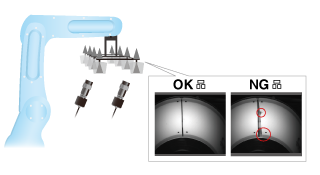
容器标签的检查


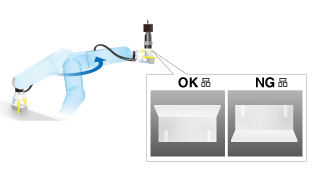
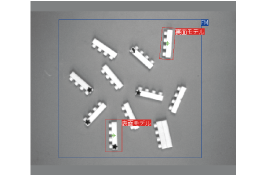
在机器人运输中检查杯子的标签偏位。考虑到高速运输,把相机装在杯子的斜下方。即使斜向取像,焦点都可以对准杯子侧面的上下方,可以进行高精度的检查。

检查对象不一定全部对准机器人抓取的方向。RobotFinder 会登记和判别表面和里面双方,可根据用途完成检查。
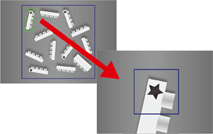
搜索可判别表里的特殊文字和记号等,并以高精度判别是否属于抽取对象

执行一次搜索,便能检测复数个相同的对象,并以串行/ 网络来输出其检测坐标。
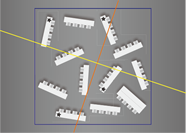
图像处理会把图像左上作为原点,但是机器人的话可以设置专用的坐标系,可输出符合机器人的坐标。
坐标系、检测数量设置
搜索设置
把检测坐标输出到机器人的时候的坐标轴方向以及旋转角度等,只需勾选就能完成设置。
登记并设置表面和里面的搜索模版。
表里条件的设置,作为距离条件的距离测定,外围判别可否确定,以及作为周边条件设定阀值。
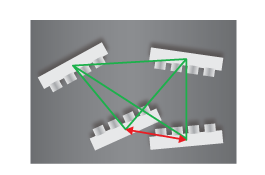
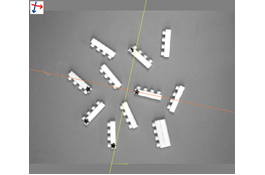
以测量对象之间的距离来确认是否有重叠或贴在一起等,从而判定机器人能否抓取。
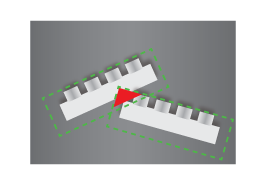
判别机器人抓取的区域内有无其他对象或异物。只挑选可抓取的对象。
我们是从事于图像处理检验的专业团体。我们不单是制造商,还兼备了图像处理算法,光学技术,电力、机械的知识和经验,并且能够处理 综合性咨询的开发型工程的企业。